Propriété et définition
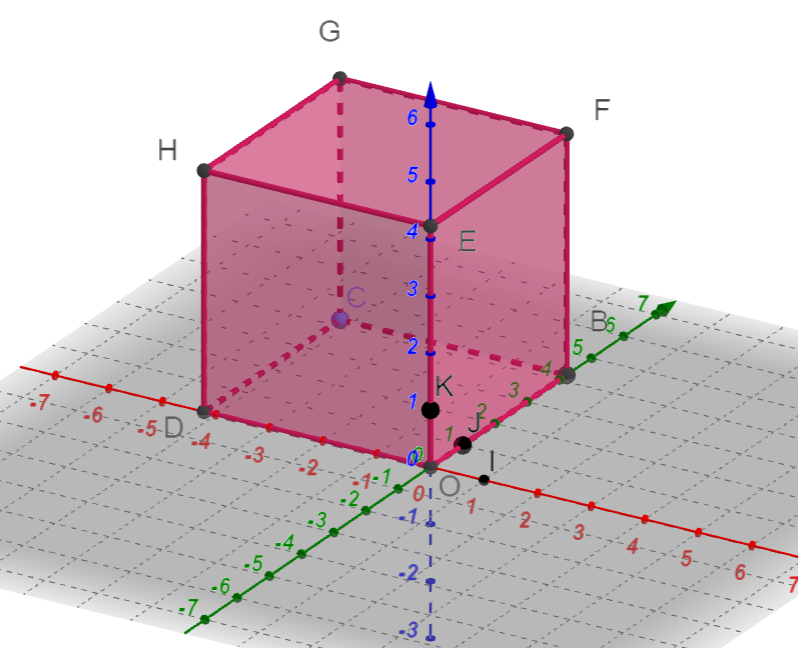
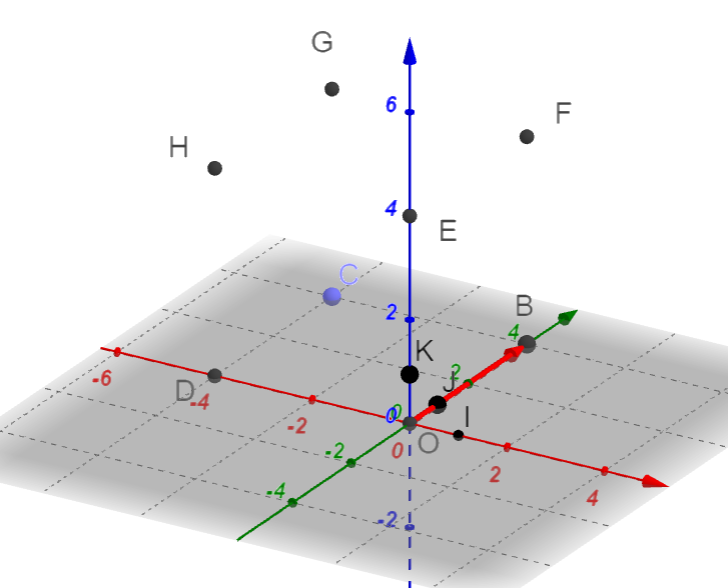
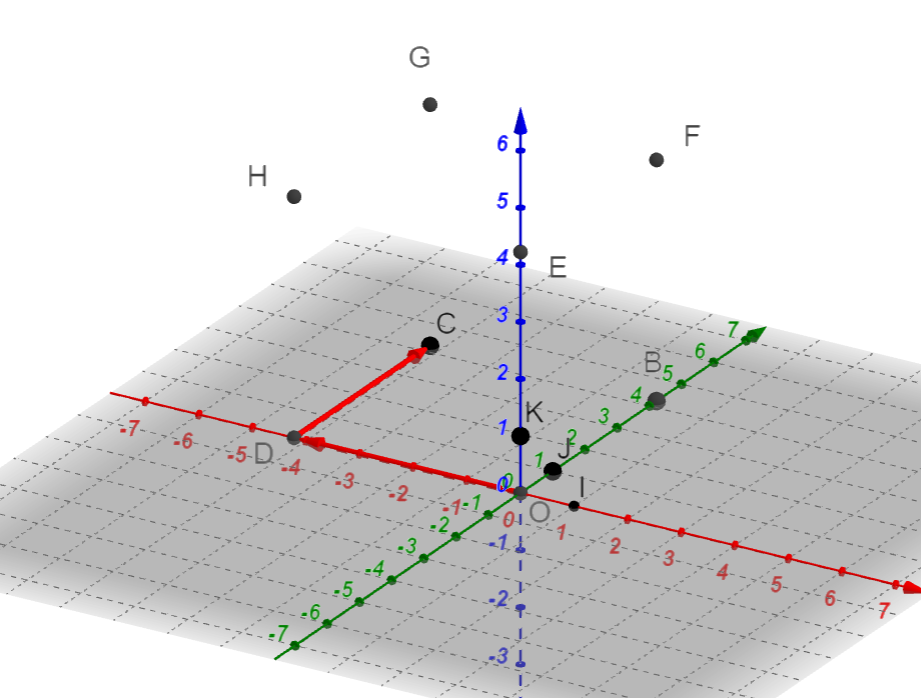
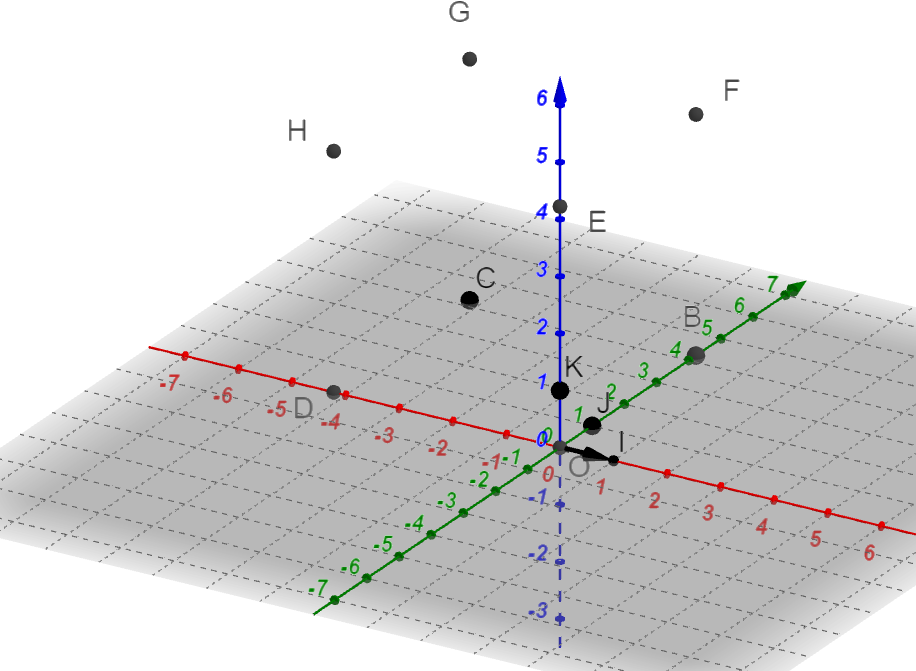
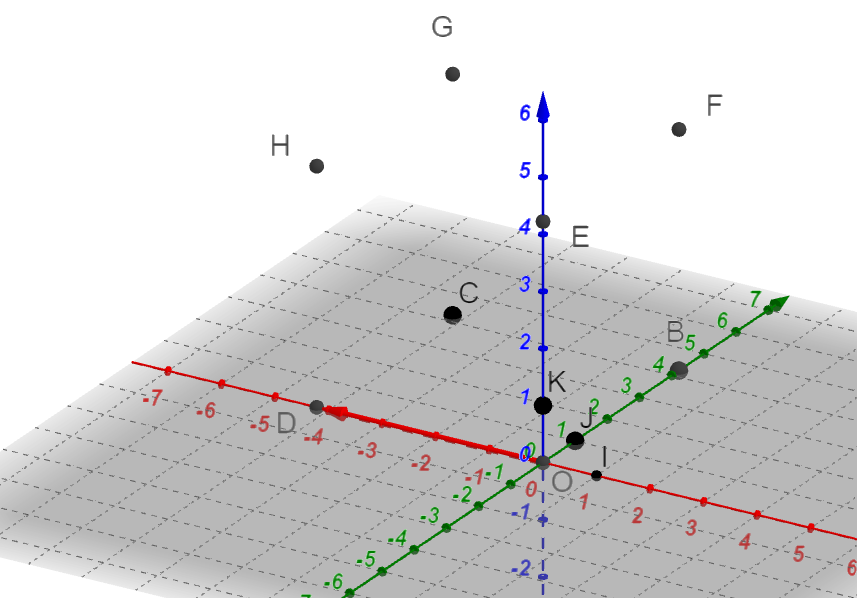
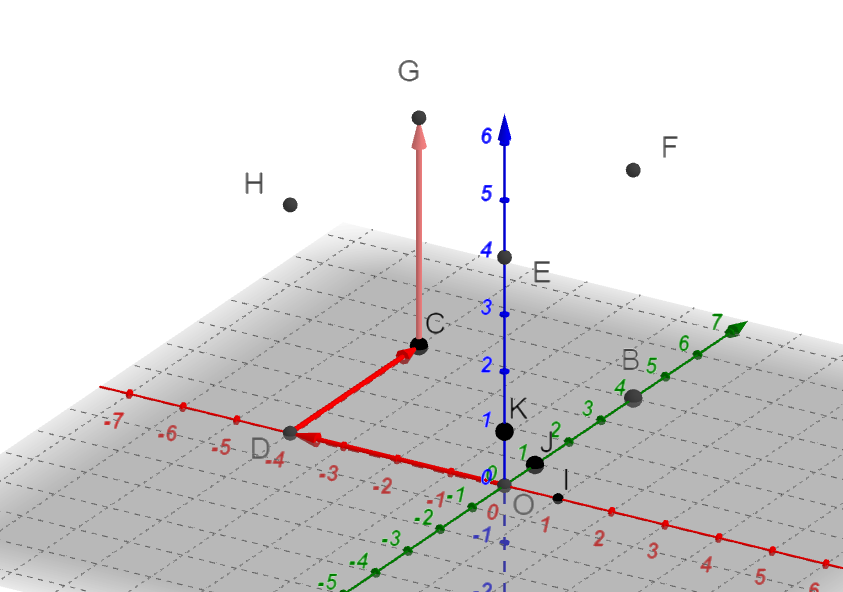
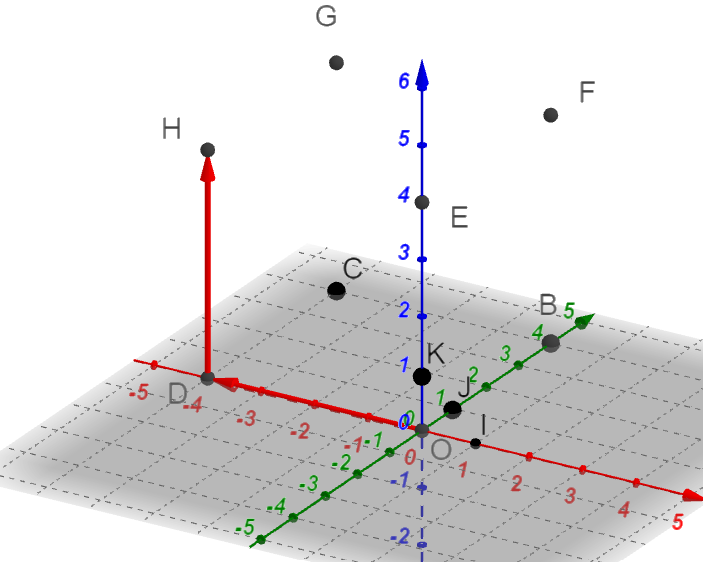
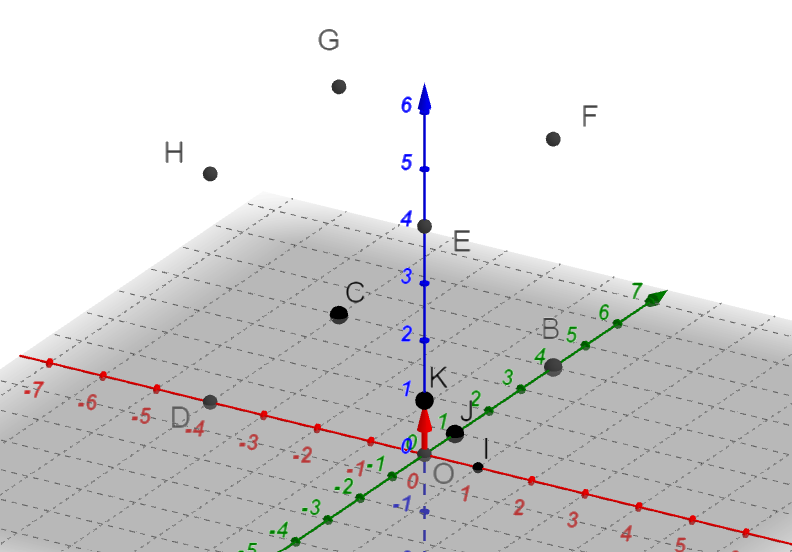
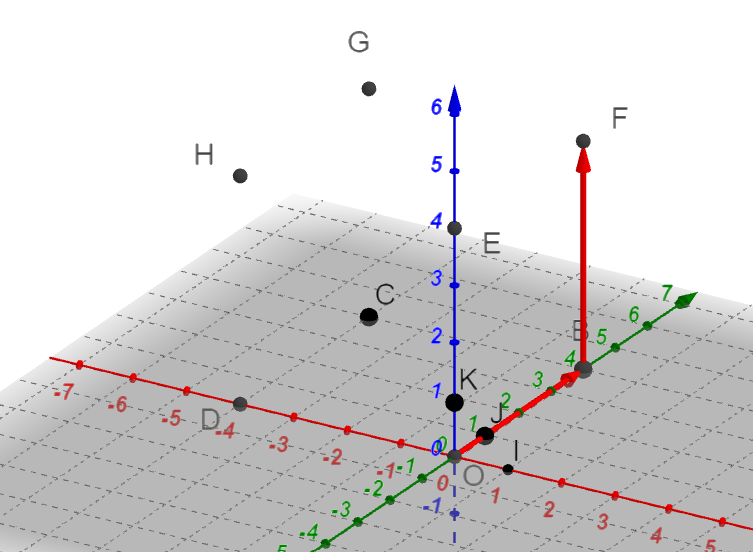
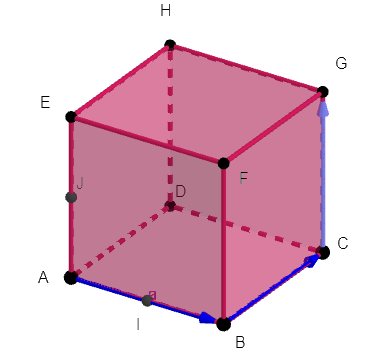
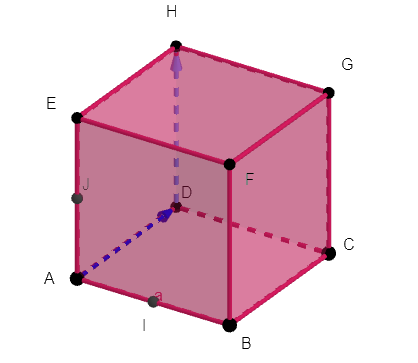
Soit (\overrightarrow{i}, \overrightarrow{j},\overrightarrow{k}) une base de l’espace.
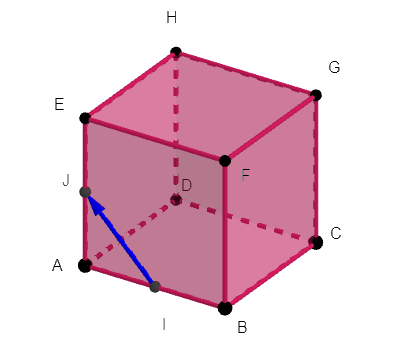
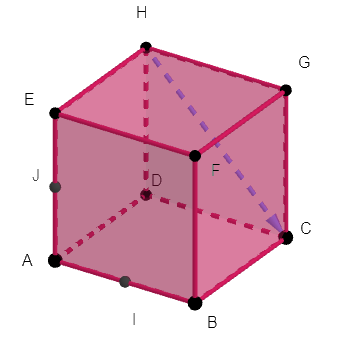
Pour tout vecteur \overrightarrow{u} de l’espace, il existe un unique triplet (x ; y ; z) tel que \overrightarrow{u}=x\overrightarrow{i}+y\overrightarrow{j}+z\overrightarrow{k}.
(x ; y ; z) sont les coordonnées de \overrightarrow{u} dans cette base. On note \overrightarrow{u}(x ; y ; z)