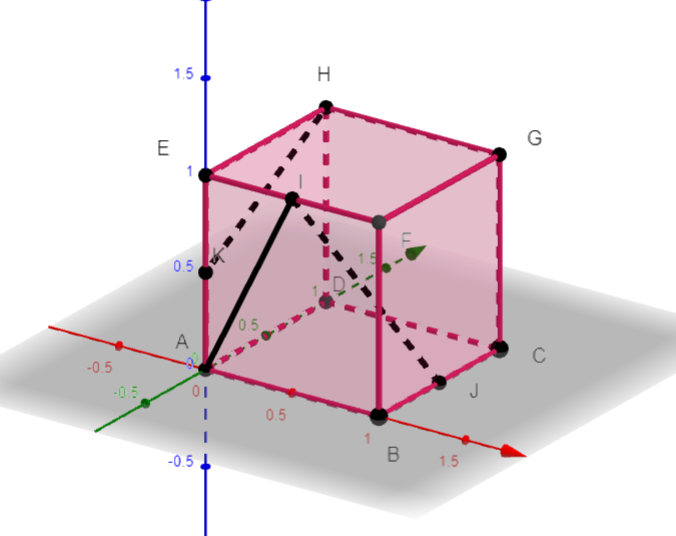
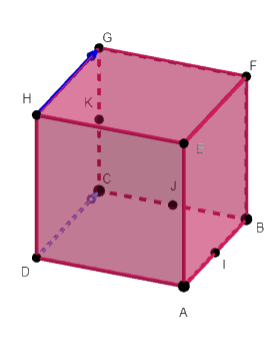
Dans la suite, on se place dans le repère orthonormé (A;\overrightarrow{AB};\overrightarrow{AD};\overrightarrow{AE})
2. a. Donner les coordonnées des points A, B, C, D, E, F et G.
Pour afficher les coordonnées du point H, par exemple, cliquer droit sur le point H de la fenêtre active Géogébra ci-dessus. Apparaît alors Point H(0;1;1).